Where can I get ADAS services done?

What is ADAS?

Advanced Driver Assistance Systems
Advanced driver assistance systems, or ADAS, is the term used to describe the growing number of safety functions designed to improve driver, passenger and pedestrian safety by reducing both the severity and overall number of motor vehicle accidents. ADAS can warn drivers of potential dangers, intervene to help the driver remain in control in order to prevent an accident and, if necessary, reduce the severity of an accident if it can’t be avoided. In short, ADAS compensates for our mistakes, be they inattentiveness, erroneous control inputs or, up to a point, downright stupidity. As uncomfortable as humans are with admitting it, we are not perfect–but ADAS is here to help. At least that’s the idea. ADAS are becoming much more common with new models of vehicles. They are no longer limited to luxury vehicles. Some systems may become standard on all vehicle makes. 
About ADAS Technologies?
Advanced Driver Assistance Systems on the Road As we have already seen, some ADAS functions are already commonplace on the roads, with many other systems available either as cost options or as standard on more expensive luxury models–an exclusivity that will inevitably change in the foreseeable future. Many systems share common sensory inputs with each other. By adopting the methodology of lateral thinking so prevalent in ADAS development, manufacturers have been combining existing and new functions to create marketing-friendly ADAS packages, in many cases with some apparent degree of autonomy. Take Tesla’s Autopilot, Nissan’s ProPilot and Volvo Pilot Assist for example. Each bundles functions including active cruise control, lane keeping assist and blind spot detection to offer Level 2 autonomy under specified conditions. The 2018 Audi A8’s Traffic Jam Pilot function is said to offer Level 3 autonomy, although regulatory issues have so far meant that the system will only be available to buyers in certain regions. Broadly speaking today’s ADAS can be divided into two camps, although there are inevitable crossovers. First we will look at the systems that assist with the control of the vehicle while it is being driven, either through warnings and alerts or by actively intervening in some way. Secondly, we will look at the comfort and convenience features that make control of the vehicle easier by reducing distractions to the driver, although some of these systems integrate with those in the first group to provide broader functions. 

ADAS System Types
Lane Keeping Technology
Lane departure warning systems are a group of safety technologies that are primarily designed to prevent high-speed accidents on highways and freeways. Basic Lane Keeping Technology alerts the driver when their vehicle is about to veer out of its lane. The driver must then take corrective action to get back into their lane. More advanced Lane Keeping Technology systems will take corrective action for the driver by either steering away from the lane marking or pro- actively maintain the vehicle’s position centred within the lane. There are a few different types of lane departure warning systems and some of them are more proactive than others. By warning the driver, or even taking automatic corrective actions, these systems are designed to prevent collisions caused by unintended lane changes. Autosupply.co.za
Currently, there are three major types of lane keeping technology:
 There are over 40 different system names used to describe the above three types of lane keeping technology. Here are the most common: • Audi – Audi active lane assist • BMW – Lane departure warning, Lane keeping assist system • GM – Lane keep assist with lane departure warning • Chrysler – LaneSense • Ford – Lane keeping system • Honda/Acura – Lane departure warning, Lane keeping assist • Hyundai/Kia – Lane departure warning, Lane keep assist • Mazda – Lane keep assist system, Lane departure warning • Mercedes – Active lane keeping assist • Mitsubishi – Lane departure warning • Nissan – Lane departure warning, Lane departure prevention • Porsche – Lane departure warning • Subaru – Eyesight with lane keeping assist • Toyota – Lane departure alert with/without steering assist • Volkswagen – Lane assist, Lane change assistant • Volvo – Lane departure warning, Lane keeping aid
There are over 40 different system names used to describe the above three types of lane keeping technology. Here are the most common: • Audi – Audi active lane assist • BMW – Lane departure warning, Lane keeping assist system • GM – Lane keep assist with lane departure warning • Chrysler – LaneSense • Ford – Lane keeping system • Honda/Acura – Lane departure warning, Lane keeping assist • Hyundai/Kia – Lane departure warning, Lane keep assist • Mazda – Lane keep assist system, Lane departure warning • Mercedes – Active lane keeping assist • Mitsubishi – Lane departure warning • Nissan – Lane departure warning, Lane departure prevention • Porsche – Lane departure warning • Subaru – Eyesight with lane keeping assist • Toyota – Lane departure alert with/without steering assist • Volkswagen – Lane assist, Lane change assistant • Volvo – Lane departure warning, Lane keeping aid
Lane Departure Warning
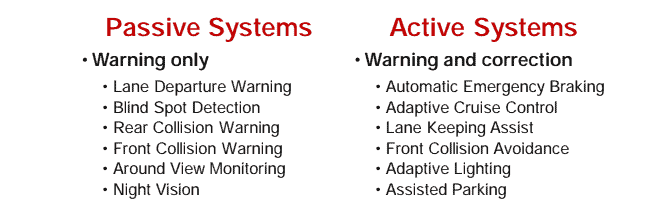
Lane Departure Warning (LDW) systems represent the first iteration of lane departure warning technology and they are the least invasive. When a vehicle equipped with this type of system drifts away from the center of its lane, the driver receives a warning. The driver is then responsible for taking corrective action. The Lane Departure Warning system utilizes a forward facing camera to monitor lane markings ahead of the vehicle. The camera utilized by the LDW system is mounted high on the windshield, usually within the rear view mirror mounting block. The camera and the accompanying software monitor the road ahead of the vehicle for lane markings in the form of solid and dashed lines. LDW monitors the vehicle’s position within the driving lane and alerts the driver if the vehicle approaches or crosses lane markers. The driver must take corrective action by steering the vehicle back to the center of the lane. Most LDW systems require a vehicle speed between 30 mph – 40 mph to activate. When the turn signal is on, the LDW system assumes the driver intends to leave the current lane and no driver feedback is provided. LDW is a passive system which provides a warning only. The LDW system does not take corrective action. 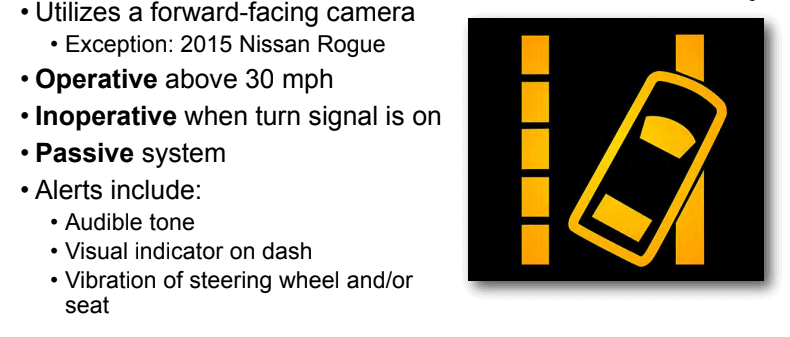 The Lane Departure Warning alert is typically one or more of the following: • An audible tone Autosupply.co.za • A visual indication on the instrument cluster as a secondary alert • A vibration in the steering wheel • A vibration in the driver’s seat
The Lane Departure Warning alert is typically one or more of the following: • An audible tone Autosupply.co.za • A visual indication on the instrument cluster as a secondary alert • A vibration in the steering wheel • A vibration in the driver’s seat
Lane Keeping Assist
Lane Keeping Assist (LKA), also known as Lane-Keeping Systems (LKS) and by other similar names, utilizes a version of the technology which goes one step further than the original LDW systems. When the vehicle drifts too far to one side of the lane or the other, and the driver does not take corrective action, Lane Keeping Assist systems utilize the vehicle’s electric power steering to make vehicle position corrections. Some early LKA systems utilize the vehicle’s brakes to nudge the vehicle back into the lane. Lane Keeping Assist, like Lane Departure Warning, utilizes a camera mounted behind the windshield to monitor the lane markings on the road ahead of the vehicle. Some vehicles may also utilize Radar or LiDAR to augment the forward facing camera. LKA systems have vehicle speed requirements similar to LDW systems and are typically operative at speeds above 30 mph. LKA systems are also inoperative when the turn signal is on.  Although Lane Keeping Assist is an active system, LKA systems apply reactive correction when the vehicle approaches the lane marking.
Although Lane Keeping Assist is an active system, LKA systems apply reactive correction when the vehicle approaches the lane marking.
Lane Centring Assist
Lane Centering Assist (LCA) is the most advanced form of lane keeping technology. Rather than providing a warning, or applying correction only when the vehicle drifts toward the edge of its lane, this type of system is actually capable of proactively keeping a vehicle centered in its lane at all times. Like Lane Keeping Assist, Lane Centering Assist utilizes a camera mounted behind the windshield to monitor the lane markings on the road ahead of the vehicle. Some vehicles may also utilize Radar or LiDAR to augment the forward facing camera.Autosupply.co.za LCA systems have vehicle speed requirements similar to LDW and LKA systems. LCA systems are also inoperative when the turn signal is on. Lane Centering Assist is an active system which utilizes the vehicle’s electric power steering to make vehicle position corrections. 
Lane Keeping Issues
All lane keeping technologies are dependent on a clear unobstructed view of the lane markings for optimal operation. Anything that interferes with the view of the forward facing camera can have a detrimental impact on the system to accurately detect lane markings. The most common issues preventing a lane keeping system from functioning properly are vehicle related.
- Dirty windshield – dirt, mud, bugs and or pollen on the windshield in front of the camera can at best cause the system to deactivate, or at worst, cause the system to misidentify lane markings.
- Worn windshield wipers – may leave streaks in front of the camera thereby obstructing the view.
- Ice or snow on windshield – an improperly cleared windshield during a winter storm may totally obstruct the forward facing camera.
- Damaged windshield – chips or cracks on the windshield which extend into the camera’s field of view may block or distort the camera’s view
- Glass quality – poor quality aftermarket glass has been know to cause distortion of the camera’s view, impairing the system’s ability to accurately detect lane markings.
- FRIT fitment – also an issue with poor quality aftermarket glass, a poor fitting FRIT may partially or fully obstruct the camera’s view. There have been cases of poor FRIT fitment obstructing one camera of a stereo camera system. Objects on dash – certain objects placed on the dash, like a white piece of paper, can cause a reflection on the windshield which may confuse the forward facing camera. This is especially true on vehicles with a very deep dash
- Damaged camera bracket – a damaged camera bracket which was reinstalled after glass replacement may cause the forward facing camera to be mounted incorrectly, impacting the camera’s ability to accurately identify lane markings.
 Other issues which can adversely affect the lane keeping system are related to environmental conditions. • Adverse weather – heavy rain, snow or fog can partially, or completely obstruct the view of the camera. • Lane marking condition – if the lane markings are worn, faded or damaged, the lane keeping system will not be able to accurately identify the lane. • Road construction – it is common in areas with road construction for the lane markings to be painted over, changed or missing all together. • Glare – in certain situations with bright sunlight, crack sealant (tar) used on the road surface may reflect sunlight and fool the lane keeping system into mis-identifying lane markings.
Other issues which can adversely affect the lane keeping system are related to environmental conditions. • Adverse weather – heavy rain, snow or fog can partially, or completely obstruct the view of the camera. • Lane marking condition – if the lane markings are worn, faded or damaged, the lane keeping system will not be able to accurately identify the lane. • Road construction – it is common in areas with road construction for the lane markings to be painted over, changed or missing all together. • Glare – in certain situations with bright sunlight, crack sealant (tar) used on the road surface may reflect sunlight and fool the lane keeping system into mis-identifying lane markings. 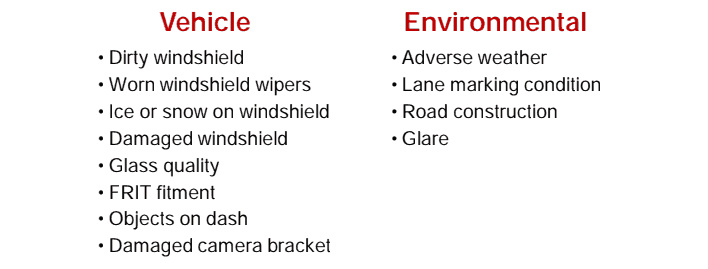
Adaptive Cruise Control
Adaptive Cruise Control (ACC) is an extension of conventional cruise control systems. An ACC system is a driver convenience feature designed to maintain a set following distance from the vehicle ahead. Adaptive Cruise Control on its own is not a collision warning or avoidance system. An ACC system is designed to assist the driver and is not a fully independent driving system. As with conventional cruise control systems, manual inputs from the driver, both to the accelerator and brake, take priority over the ACC system. ACC systems allow for a set following distance or time interval between the ACC vehicle and the forward vehicle, as well as a set speed. Driver convenience is enhanced since fewer accelerating and braking operations are necessary. The set distance (timed in seconds) is the desired distance between the ACC vehicle and the forward vehicle. When a forward vehicle is detected, controlling acceleration and braking operations without driver intervention maintains the set distance between vehicles. The set speed is the desired maximum speed to be regulated by the ACC system on an open road. If no forward vehicle is detected, the set speed is regulated.  While adaptive cruise control systems use many of the same parts as conventional cruise control systems, there are a few additional components involved. Instead of relying on driver input, adaptive cruise control systems make use of laser or radar sensors. These sensors are capable of detecting the presence and speed of other vehicles and that information is used to maintain a safe following distance. If adaptive cruise control detects an obstruction in the roadway, or the lead vehicle slows down, the system is capable of cutting the throttle, downshifting, and even activating the brakes. Adaptive Cruise Control with steering assist combines ACC with LCA for use at highway speeds. The addition of the radar or laser unit to the front of the vehicle adds more challenges when repairing vehicles with front-end damage. Operation, diagnosis, and repair information for ACC systems can vary depending on the vehicle maker.
While adaptive cruise control systems use many of the same parts as conventional cruise control systems, there are a few additional components involved. Instead of relying on driver input, adaptive cruise control systems make use of laser or radar sensors. These sensors are capable of detecting the presence and speed of other vehicles and that information is used to maintain a safe following distance. If adaptive cruise control detects an obstruction in the roadway, or the lead vehicle slows down, the system is capable of cutting the throttle, downshifting, and even activating the brakes. Adaptive Cruise Control with steering assist combines ACC with LCA for use at highway speeds. The addition of the radar or laser unit to the front of the vehicle adds more challenges when repairing vehicles with front-end damage. Operation, diagnosis, and repair information for ACC systems can vary depending on the vehicle maker.
Forward Collision Warning
The primary role of Forward Collision Warning (FCW) is to prevent or lessen the severity of rear-end collisions–a type of accident that is extremely common on busy urban roads and in stop-start queues of traffic.  Most Forward Collision Warning (FCW) systems draw on existing technologies. Since these systems require front-facing sensors, they often pull data from the same sensors that are used by an adaptive cruise control system. Depending on the particular system, those sensors may use radar, lasers, or other techniques to map the physical space in front of a vehicle.
Most Forward Collision Warning (FCW) systems draw on existing technologies. Since these systems require front-facing sensors, they often pull data from the same sensors that are used by an adaptive cruise control system. Depending on the particular system, those sensors may use radar, lasers, or other techniques to map the physical space in front of a vehicle. 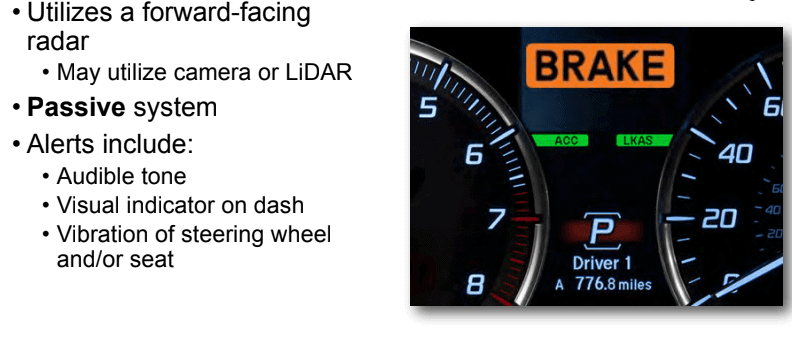 When the FCW system receives data from forward facing sensors, the system performs calculations to determine if there are any potential obstructions present. If the speed differential between the vehicle and any object in front of it is too great, then the system will issue a warning, which will hopefully provide the driver with enough advanced warning to hit the brakes or steer away from the obstruction.
When the FCW system receives data from forward facing sensors, the system performs calculations to determine if there are any potential obstructions present. If the speed differential between the vehicle and any object in front of it is too great, then the system will issue a warning, which will hopefully provide the driver with enough advanced warning to hit the brakes or steer away from the obstruction.
Forward Collision Avoidance
In some cases, the collision avoidance system may also pre-charge the brakes in conjunction with an automatic braking or emergency brake assist system. This can provide the driver with a substantial amount of braking power the moment he depresses the pedal, which may effectively reduce the severity of an accident. Some automobile collision avoidance systems are also capable of taking direct, corrective measures. If one of these systems determines that a collision is imminent, it can actually engage the brakes rather than simply pre-charging them. 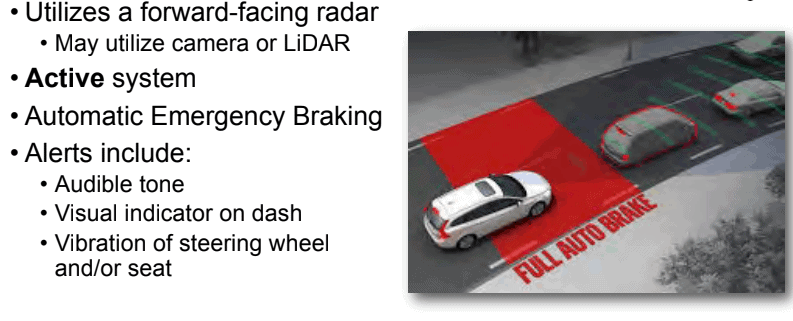 Forward Collision Warning (FCW) paired with Auto-matic Emergency Braking (AEB) is known as Forward Collision Avoidance (FCA). Using a forward facing radar, cameras and/or LiDAR, FCA monitors the road ahead and warns against the possibility of a collision with vehicles in front, specifically those that are slowing down or moving more slowly than the car to which the system is fitted. When a collision is deemed likely, the FCW system alerts the driver to the possibility with a series of increasingly urgent audible, visual and sometimes haptic alerts. At the same time, some systems pre-charge the braking hydraulics in preparation for a possible emergency stop, either autonomously or by the driver. If the driver takes no action, then further warnings might include a sharp, but momentary application of the brakes. Finally, if no action is taken, the system will intervene with a full application of the brakes, either avoiding a collision completely or at least lessening its severity. Many FCA with AEB systems also include an element of pre-collision preparation such as automatic pre-tensioning of seatbelts (which can also serve as a FCW alert in itself) and closing windows, and even a degree of steering control under certain circumstances.
Forward Collision Warning (FCW) paired with Auto-matic Emergency Braking (AEB) is known as Forward Collision Avoidance (FCA). Using a forward facing radar, cameras and/or LiDAR, FCA monitors the road ahead and warns against the possibility of a collision with vehicles in front, specifically those that are slowing down or moving more slowly than the car to which the system is fitted. When a collision is deemed likely, the FCW system alerts the driver to the possibility with a series of increasingly urgent audible, visual and sometimes haptic alerts. At the same time, some systems pre-charge the braking hydraulics in preparation for a possible emergency stop, either autonomously or by the driver. If the driver takes no action, then further warnings might include a sharp, but momentary application of the brakes. Finally, if no action is taken, the system will intervene with a full application of the brakes, either avoiding a collision completely or at least lessening its severity. Many FCA with AEB systems also include an element of pre-collision preparation such as automatic pre-tensioning of seatbelts (which can also serve as a FCW alert in itself) and closing windows, and even a degree of steering control under certain circumstances.
Rear Collision Warning
The Rear Collision Warning (RCW) system alerts the driver to an impending collision from the rear. Most RCW systems utilize a reward facing radar sensor to track the position and closing speed of the vehicle approaching from the rear.  Depending on the implementation by the vehicle manufacturer, a Rear Collision Warning system can be either passive or active. Passive systems provide a warning to the driver in the form of an audible tone, visual warning indicator or through a haptic alert. Active systems go a step further and can tighten the seatbelt or adjust the headrest to reduce injury.
Depending on the implementation by the vehicle manufacturer, a Rear Collision Warning system can be either passive or active. Passive systems provide a warning to the driver in the form of an audible tone, visual warning indicator or through a haptic alert. Active systems go a step further and can tighten the seatbelt or adjust the headrest to reduce injury. 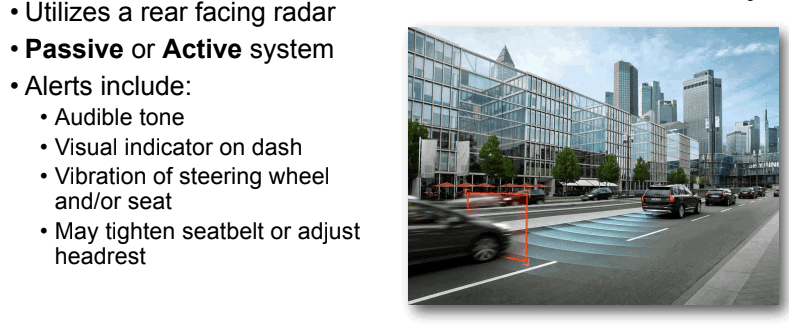
Blind Spot Detection
This driver assistance technology senses vehicles coming up in your blind spot behind or alongside you, and if your turn signal is on, it alerts you not to change lanes.  Drivers are warned by a flashing light on the side-view mirror and then an audible beep or steering wheel vibration. If the driver is not planning to change lanes (there is no turn signal on), the warning light glows steadily, but does not flash and there is no audible alert. Blind Spot Detection (BSD) systems use a variety of sensors and cameras to provide a driver with information about objects that are outside his range of vision. Cameras can provide views from either side of a vehicle that allow a driver to verify that his blind spot is clear and rear-view cameras can be useful when backing up or parallel parking. Other systems use sensors to detect the presence of objects like cars and people and that information can be presented to the driver in a number of ways.Some blind spot detection systems are able to tell the difference between a large object like a car and smaller objects like a person, and they will simply alert the driver that there is a car or pedestrian located in one of his blind spots.
Drivers are warned by a flashing light on the side-view mirror and then an audible beep or steering wheel vibration. If the driver is not planning to change lanes (there is no turn signal on), the warning light glows steadily, but does not flash and there is no audible alert. Blind Spot Detection (BSD) systems use a variety of sensors and cameras to provide a driver with information about objects that are outside his range of vision. Cameras can provide views from either side of a vehicle that allow a driver to verify that his blind spot is clear and rear-view cameras can be useful when backing up or parallel parking. Other systems use sensors to detect the presence of objects like cars and people and that information can be presented to the driver in a number of ways.Some blind spot detection systems are able to tell the difference between a large object like a car and smaller objects like a person, and they will simply alert the driver that there is a car or pedestrian located in one of his blind spots. 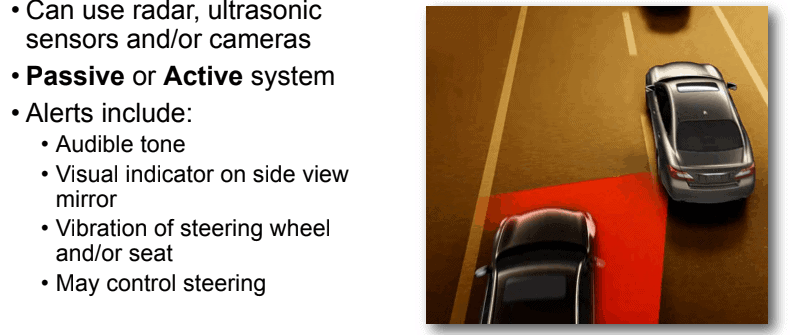 When a blind spot detection system detects a vehicle, pedestrian, or a large object enters a blind spot, systems are capable of alerting the driver in various ways. Some systems use an audible alert and others can display a simple warning in the corner of the rear-view or side mirror if there is a vehicle in the blind spot.The system usually provides a series of escalating alerts to the driver, initiated when a vehicle enters the area covered by the sensors. First, a visual warning is given by means of a flashing light, often mounted within the door mirror. If a maneuver is commenced or continued nonetheless, often in response to the activation of the turn signal, then an audible and/or haptic warning may be given, finally followed in some cases by steering intervention. Blind spot monitoring systems are sometimes marketed as lane-change assist systems and are increasingly common on today’s vehicles. Volvo first introduced its Blind Spot Information System (BLIS) in 2007. Vehicle makers now have a way to monitor the blind spots beyond just the length of the vehicle. This extends the blind spot detection to the end of a trailer being towed. In 2017, Ford began offering this system for the F-150. Ford applied the system to the Expedition and Navigator in 2018. In 2019, RAM will offer this system along with their Blind Spot Monitoring and Rear Cross-Path Detection. Always reference vehicle maker service information to identify post-repair calibration requirements.
When a blind spot detection system detects a vehicle, pedestrian, or a large object enters a blind spot, systems are capable of alerting the driver in various ways. Some systems use an audible alert and others can display a simple warning in the corner of the rear-view or side mirror if there is a vehicle in the blind spot.The system usually provides a series of escalating alerts to the driver, initiated when a vehicle enters the area covered by the sensors. First, a visual warning is given by means of a flashing light, often mounted within the door mirror. If a maneuver is commenced or continued nonetheless, often in response to the activation of the turn signal, then an audible and/or haptic warning may be given, finally followed in some cases by steering intervention. Blind spot monitoring systems are sometimes marketed as lane-change assist systems and are increasingly common on today’s vehicles. Volvo first introduced its Blind Spot Information System (BLIS) in 2007. Vehicle makers now have a way to monitor the blind spots beyond just the length of the vehicle. This extends the blind spot detection to the end of a trailer being towed. In 2017, Ford began offering this system for the F-150. Ford applied the system to the Expedition and Navigator in 2018. In 2019, RAM will offer this system along with their Blind Spot Monitoring and Rear Cross-Path Detection. Always reference vehicle maker service information to identify post-repair calibration requirements.
Cross-Traffic Alert
Cross-traffic alert is a short-range object detection system initially designed to aid drivers reversing out of parking spaces, but since developed to include forward-facing systems for use not only in car parks, but also at junctions with limited or restricted visibility.
 The audible alerts to the driver of approaching hazards may be augmented by cameras providing an in-car view of the area behind the vehicle–although it is perhaps more accurate to say that the cross-traffic alert is a later augmentation of the standalone rear-view camera. In most cases, the cross-traffic alert system is passive and only provides an alert to the driver, but some systems will actively brake the car in order to avoid a collision. This latter function is sometimes referred to as reverse autonomous emergency braking, or reverse AEB. Can use radar, ultrasonic sensors and/or cameras • Passive or Active system • Alerts include: • Audible tone • Visual indicator on dash • Vibration of steering wheel and/or seat • May apply brakes
The audible alerts to the driver of approaching hazards may be augmented by cameras providing an in-car view of the area behind the vehicle–although it is perhaps more accurate to say that the cross-traffic alert is a later augmentation of the standalone rear-view camera. In most cases, the cross-traffic alert system is passive and only provides an alert to the driver, but some systems will actively brake the car in order to avoid a collision. This latter function is sometimes referred to as reverse autonomous emergency braking, or reverse AEB. Can use radar, ultrasonic sensors and/or cameras • Passive or Active system • Alerts include: • Audible tone • Visual indicator on dash • Vibration of steering wheel and/or seat • May apply brakes
Around View Monitoring
 Around View Monitor system, stitches together a birds-eye view of your vehicle from overhead and shows a moving image on the vehicle’s LCD display, along with parking lot lane markings, curbs, and adjacent cars. The best systems reinforce the visual information with sonar that warns if you are too close to an obstruction, whether it is behind or in front.
Around View Monitor system, stitches together a birds-eye view of your vehicle from overhead and shows a moving image on the vehicle’s LCD display, along with parking lot lane markings, curbs, and adjacent cars. The best systems reinforce the visual information with sonar that warns if you are too close to an obstruction, whether it is behind or in front. 
Adaptive Lighting
What are adaptive headlights? Adaptive headlights are an active safety feature designed to make driving at night or in low-light conditions safer by increasing visibility around curves and over hills. When driving around a bend in the road, standard headlights continue to shine straight ahead, illuminating the side of the road and leaving the road ahead of you in the dark. Adaptive head-lights, on the other hand, turn their beams according to your steering input so that the vehicle’s actual path is lit up. Similarly, when a vehicle with standard headlights crests a hill, the headlight beams temporarily point upwards towards the sky. This makes it difficult for drivers to see the road ahead and for oncoming motorists to see the driver approaching. In contrast, adaptive headlights use a self-levelling system that points the light beam up or down, according to the position of the vehicle. Adaptive headlights are also sometimes called active headlights or adaptive front-lighting systems. • Sensor inputs • Wheel speed sensors • Yaw rate sensor • Steering angle sensor • Headlight level sensor • Adjusts headlight motors • Light pattern adapts to surroundings • Lights turn with steering input • Auto high-beam/dimmer Adaptive headlight systems are made up of several subcomponents that are monitored and controlled by an electronic control unit. The subcomponents include: • Wheel speed sensors that monitor the speed of rotation of each wheel • Yaw sensor that tracks a vehicle’s side-to-side movement, e.g., when turning a corner • Steering input sensor that monitors the angle of the steering wheel • Small motors attached to each headlight The data from the sensors are interpreted by the ECU, which then determines the vehicle’s speed, and the angle and length of the curve it is negotiating. The ECU directs the motors attached to each headlight to move the beam to the degree specified by the ECU. Most adaptive headlight systems can turn the headlights up to 15 degrees per side. Newer versions of the advanced headlight system have even larger ranges of motion. Most adaptive headlight setups also include a self-levelling system. This system helps prevent headlights from pointing too far up or too far down when driving up or down hills. A self-levelling system includes a level sensor that sends information to the ECU about the vehicle’s position, specifically whether it is tilted forward or backwards. The headlights are then moved up or down to correct for the vehicle’s positioning. The result, depending on the system, is the creation of front lighting that adapts to speed, vehicle direction, road conditions, oncoming traffic and surroundings such as road curve and grade. The end result is a system that cannot only switch from dim to bright and turn right to left, but also change the effective shape of the light beam to optimize the driver’s vision no matter what the conditions. These sophisticated headlight systems can selectively avoid certain areas (e.g., the windshield of an oncoming car), or selectively highlight certain areas (e.g., pedestrians or animals). Systems can also adjust the brightness and focus of the headlights based on vehicle speed and other factors.
Night Vision Systems
Night vision systems use an infrared sensor typically in the grille to look for warm objects in the roadway. The sensor is a video camera that captures the infrared spectrum just above visible light. The sensor outputs the moving image to a dashboard display. Increasingly, that is coupled with sophisticated algorithms that detect humans and large animals, and most recently, that sound an alert. This is the case for all night vision technologies. Automotive Night Vision (NV) systems are broken into two basic categories, which are referred to as active and passive. Passive night vision systems use thermal cameras that are capable of picking up the heat that radiates from objects, animals, and people. Active systems use infrared light sources to illuminate the darkness. Both active and passive night vision systems rely on the infrared light spectrum that we cannot see with the naked eye, and each one has its own benefits and drawbacks.  How passive night vision works: long range, simpler image The majority of automotive night vision systems are passive systems. Think of passive meaning efficient, not weak or submissive. Passive night vision systems rely on thermographic cameras to detect thermal radiation. Since thermographic cameras essentially see heat, it is easy for them to pick out the difference between a warm object like a person and a cooler object like a road. Data from the thermal cameras used in passive systems is typically processed into a black and white image that provides the driver with an enhanced view of the road ahead. Due to the reliance on heat emissions, passive systems tend to work very well with people, animals and other vehicles since they all emit a lot of thermal radiation. The drawback of passive systems is that they have trouble picking up inanimate objects that are about the same temperature as the surrounding environment. The range of passive night vision tends to be significantly higher than the range of active night vision, which is due to the limited power of the light sources used by the latter systems. However, the image quality produced by the thermographic cameras tends to be poor when compared to active systems and they don’t work as well in warm weather since an increase in the ambient temperature will naturally cause normally cool objects like road surfaces to warm up during the day and then radiate heat after the sun goes down. Passive night vision wins hands down for claimed range, up to 1,000 feet or 300 meters. (At 60 mph on a country road, that’s theoretically more than 10 seconds of travel time. How active night vision works: shorter range, lifelike images Active night vision systems use an infrared illuminator, sometimes part of the headlamp cluster to light up the road in the IR spectrum. The image can be higher-resolution than passive. Roads and buildings show up better. That is why drivers initially think they are watching black and white TV of the road ahead. With active night vision, it is possible to mount the camera higher in the car, in the rear view mirror cluster, for a better view. As with normal headlamps, the range of active night vision systems is reduced in rain, snow or fog, and effectiveness falls off with the square of the distance. The lifelike image might induce some drivers to think they can steer by the night vision display alone. It is just not possible except maybe for a few seconds on country roads where the illuminator clearly shows the pavement centerline and edge markings. The biggest drawback with active NV is range, an estimated 500-650 feet or 150-200 meters. That is still two football fields in length. Active systems are more complex than passive systems because they use infrared light sources. Since the infrared band falls outside the visible spectrum, these light sources don’t cause oncoming drivers to suffer from temporary night blindness like high beam headlights can. That allows the infrared lights to illuminate objects that are significantly further away than headlights are able to reach. Since infrared light isn’t visible to the human eye, active night vision systems use special cameras to relay the extra visual data.
How passive night vision works: long range, simpler image The majority of automotive night vision systems are passive systems. Think of passive meaning efficient, not weak or submissive. Passive night vision systems rely on thermographic cameras to detect thermal radiation. Since thermographic cameras essentially see heat, it is easy for them to pick out the difference between a warm object like a person and a cooler object like a road. Data from the thermal cameras used in passive systems is typically processed into a black and white image that provides the driver with an enhanced view of the road ahead. Due to the reliance on heat emissions, passive systems tend to work very well with people, animals and other vehicles since they all emit a lot of thermal radiation. The drawback of passive systems is that they have trouble picking up inanimate objects that are about the same temperature as the surrounding environment. The range of passive night vision tends to be significantly higher than the range of active night vision, which is due to the limited power of the light sources used by the latter systems. However, the image quality produced by the thermographic cameras tends to be poor when compared to active systems and they don’t work as well in warm weather since an increase in the ambient temperature will naturally cause normally cool objects like road surfaces to warm up during the day and then radiate heat after the sun goes down. Passive night vision wins hands down for claimed range, up to 1,000 feet or 300 meters. (At 60 mph on a country road, that’s theoretically more than 10 seconds of travel time. How active night vision works: shorter range, lifelike images Active night vision systems use an infrared illuminator, sometimes part of the headlamp cluster to light up the road in the IR spectrum. The image can be higher-resolution than passive. Roads and buildings show up better. That is why drivers initially think they are watching black and white TV of the road ahead. With active night vision, it is possible to mount the camera higher in the car, in the rear view mirror cluster, for a better view. As with normal headlamps, the range of active night vision systems is reduced in rain, snow or fog, and effectiveness falls off with the square of the distance. The lifelike image might induce some drivers to think they can steer by the night vision display alone. It is just not possible except maybe for a few seconds on country roads where the illuminator clearly shows the pavement centerline and edge markings. The biggest drawback with active NV is range, an estimated 500-650 feet or 150-200 meters. That is still two football fields in length. Active systems are more complex than passive systems because they use infrared light sources. Since the infrared band falls outside the visible spectrum, these light sources don’t cause oncoming drivers to suffer from temporary night blindness like high beam headlights can. That allows the infrared lights to illuminate objects that are significantly further away than headlights are able to reach. Since infrared light isn’t visible to the human eye, active night vision systems use special cameras to relay the extra visual data.  Some systems use pulsed infrared lights and others use a constant light source. These systems do not work very well in adverse weather conditions like heavy snow and hail which can partially block the infrared light source. However, they do typically provide high contrast images of vehicles, animals, and even inanimate objects.
Some systems use pulsed infrared lights and others use a constant light source. These systems do not work very well in adverse weather conditions like heavy snow and hail which can partially block the infrared light source. However, they do typically provide high contrast images of vehicles, animals, and even inanimate objects.
ADAS Sensing & Imaging
ADAS Sensors
Sensor technology is a key driver of ADAS development. This fusion of sensor technology is rapidly becoming the norm. The task then is to process the influx of data from multiple sources both accurately and quickly. Another factor to consider is the robustness and durability of the sensors. While some sensors can be located inside the vehicle’s cabin, many require mounting externally towards the vehicle’s extremes in vulnerable areas such as the corners of bumpers and behind the grille and these can be hostile environments for high-tech equipment. The automotive insurance and repair industry has also raised concerns about the issue of expensive sensor replacement or recalibration if the vehicle is involved in an accident. The growing uptake of ADAS and the ongoing development of autonomous vehicles is driving the advance of sensor technology at an accelerated rate. In terms of object detection and classification, many systems already in use are still operating at a relatively basic level and there is a long way to go before ADAS functionality can make the jump to fully autonomous applications. Current systems can, for example, struggle to identify pedestrians beyond a very specific form. They may fail to recognize a person wearing clothing that significantly alters their outline, if they are carrying a large object or if they are below a certain height. As the technology develops, however, these limitations will inevitably be addressed. Current ADAS sensor technology can be divided into four main categories, which we will look at in a bit more detail.
ADAS System Sensors
 ADAS and autonomous driving functions feed off a continuous stream of information about the environment surrounding the vehicle and it is the sensors’ job to provide that. The sensor is required to detect not only every-thing the driver can see, but also that which the driver can’t–or hasn’t noticed. There are a number of different kinds of sensors already in use, each with their own advantages and disadvantages in terms of capability, cost and packaging and it is increasingly the case that more than one type of sensor is used for each ADAS function. Each type of sensor has acknowledged strengths and weaknesses, so by combining different technologies, it is possible to refine the ADAS functions.
ADAS and autonomous driving functions feed off a continuous stream of information about the environment surrounding the vehicle and it is the sensors’ job to provide that. The sensor is required to detect not only every-thing the driver can see, but also that which the driver can’t–or hasn’t noticed. There are a number of different kinds of sensors already in use, each with their own advantages and disadvantages in terms of capability, cost and packaging and it is increasingly the case that more than one type of sensor is used for each ADAS function. Each type of sensor has acknowledged strengths and weaknesses, so by combining different technologies, it is possible to refine the ADAS functions.
Cameras
Camera-based solutions have gained traction as the ADAS developer’s sensor technology of choice. They have their limitations–namely their susceptibility to compromised performance in poor weather and low or challenging light conditions. But the technology, while relatively new com- pared with radar or ultrasonic sensors, is already capable and versatile. 
Camera Applications
Unlike the other sensors here, cameras are the only ones able to identify colour and contrast information, which makes them ideally suited to capturing road sign and road marking information and they also offer the resolution to classify objects such as pedestrians, cyclists and motorcyclists. Cameras are also extremely cost-effective, which makes them particularly attractive to volume-selling vehicle manufacturers. Due to the limitations of the technology, the data from cameras sensors is increasingly being combined with radar to provide a more robust and reliable data stream across a wider variety of conditions. 
Monocular Cameras

Stereo-Scopic Cameras
Forward-facing binocular or stereo cameras are a more recent development. A pair of cameras is able to present an essentially 3D image that provides the information necessary to calculate complex depth information such as the distance to a moving object, making them suitable for active cruise control and forward collision warning applications. 
Blind Spot Cameras

Radar
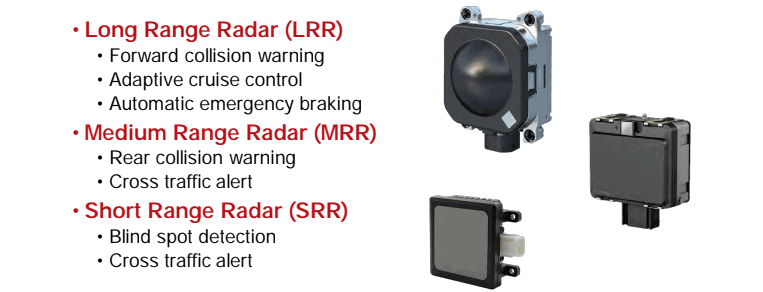
Perhaps the best recognized of all the technologies currently adopted for ADAS sensors is radar. Radar–an acronym for radio detection and ranging is a well established technology that detects objects by measuring the time it takes for transmitted radio waves to reflect back off any objects in their path. Radar was first developed concurrently by several nations for military use in the lead-up to the second world war, but today, it has many applications on land, in the sea, in the air and in space. Radar has been in use in automotive systems for some years now, so the hardware is well developed and relatively affordable, making it attractive to car manufacturers.  For ADAS applications, radar can be divided into three categories: short-range radar (SRR), mid-range radar (MMR) and long-range radar (LRR). SRR systems traditionally use microwaves in the region of 24 GHz, but there has been an industry shift towards 77 GHz due to, among other things, the 24 GHz frequency’s limited bandwidth and changing regulatory requirements. SRRs have a useful range of around 10 meters, but up to 30 meters, making them suitable for blind spot detection, lane-change assist, park assist and cross-traffic monitoring systems.
For ADAS applications, radar can be divided into three categories: short-range radar (SRR), mid-range radar (MMR) and long-range radar (LRR). SRR systems traditionally use microwaves in the region of 24 GHz, but there has been an industry shift towards 77 GHz due to, among other things, the 24 GHz frequency’s limited bandwidth and changing regulatory requirements. SRRs have a useful range of around 10 meters, but up to 30 meters, making them suitable for blind spot detection, lane-change assist, park assist and cross-traffic monitoring systems. 
Radar Types
LiDAR
Each of the two main systems has its advantages and disadvantages. Solid-state LiDAR is preferable for automotive use not least for being more robust, but in each case, the emitted laser is reflected back off any objects within range and is received by a highly sensitive photodetector, after which the information is converted into a 3D model of the immediate environment. It is the detail and resolution of that 3D model that give LiDAR the potential to be such a powerful tool. With the appropriate analytic algorithms, a LiDAR system has the ability to detect objects, differentiate between them and accurately track them, all in high-resolution 3D. LiDAR also works well in rain and snow, although it can be adversely affected by fog and its function is unaffected at night. Historically, LiDAR has been prohibitively expensive for use in production automotive applications, but it is slowly becoming more common in ADAS development, as the technology is refined and costs come down. Prototype fully autonomous cars have already made use of the bulky roof-mounted LiDAR systems to good effect, but such a set-up is impractical and prohibitively expensive for commercial ADAS applications. For the time being, the LiDAR systems that are compact enough, and affordable enough, to be packaged out of sight on production vehicles have a relatively limited range measured in the tens of meters rather than hundreds and are therefore, only effective at lower speeds.
Thermal & Infrared
Another branch of camera technology that has established a foothold in ADAS development is thermal imaging. Instead of using visible light, or what little of it that might be available, thermal imaging cameras are ide- ally suited to detecting humans and animals, particularly in conditions of poor visibility or at night, or simply in an otherwise busy and cluttered driving environment. Again, the technology is well-established and widely in use across the automotive industry, first appearing as passive night vision assist systems on premium-brand models around 10 years ago. Thermal imaging cameras have a range of up to 300 meters or so and are unaffected by fog, dust, glare from low sun and, of course, complete darkness, and they have a valuable role to play in the ADAS developers arsenal of sensor technologies.
Ultrasonic
Ultrasonic sensors use reflected sound waves to calculate the distance to objects. Of all the ADAS sensor technologies, ultrasonic sensors are the oldest and most well-established. Ultrasonic sensors, also known as ultrasonic transducers, have a relatively short effective operating range, around 2 meters, so they are typically used in low-speed systems. Their use as parking sensors has been widespread for some time, but they have also found a place in more complex ADAS functions such as park assist, self-parking and some blind-spot monitoring applications. Ultrasonic sensors are cost-effective and relatively robust and reliable, plus they are unaffected by night time or other challenging light conditions such as bright and low sunlight. Given the limited range of established ultrasonic sensors, however, some manufacturers are abandoning them in favor of short-range radar. This is particularly the case with the latest rear cross-traffic/pedestrian alert systems that combine existing parking sensor technology with additional blind-spot detection, although recent developments in ultrasonic technology have seen the ranges of some sensors extend to 8-10 meters or so, making them suitable for such applications.
Multifunction Units
No single sensor type works well for all Advanced Driver Assistance Systems, nor will a single sensor type function adequately in all driving and weather condition. A combination of different sensor types working together deliver greater accuracy at object detection in a wide range of environmental conditions, as well as provide a level of redundancy for added safety. This mix of sensor types is known as Sensor Fusion. Sensor Fusion can be achieved by utilizing separate sensors mounted in various locations around the vehicle.One example is the use of a windshield mounted forward facing camera along with one or more front mounted radar sensors for enhanced lane centering assist, adaptive cruise control or forward collision warning.  Another method to achieve sensor fusion is to combine multiple sensor types in a single module to reduce cost and provide for simpler installation. Multifunction units can be configured with a wide variety of sensor combinations. Upper Left: • Aerostar TRL6 • Combines stereo camera with LiDAR Center: ADAS ONE HS-500F is an integrated camera system consisting of a front camera equipped with wide angle stereo camera, narrow angle monocular camera and an infrared IR camera. In performing ADAS, its stereo camera can detect an object within short distance while the monocular camera detects it in long distance away and its IR camera is for night vision function. The multifunction camera system provides more accurate vision data for multiple ADAS functions. Upper Right: Continental Multi Function Camera with LiDAR – MFL4x0. The latest innovation of the short range LiDAR technology will incorporate the multi-functional-camera MFC400. This provides multiple advantages in terms of packaging and function. The new MFL4x0 integrates an infrared short range LiDAR (Light Detection And Ranging) sensor and a CMOS camera into a single compact unit, which can be installed in the mirror base even in small cars. With the MFL4x0, Continental has for the first time integrated two highly competitive sensor technologies in one housing. The camera together with the short range. LiDAR are already in series production today bringing them together into one unit, however, it is a novelty. The new sensor module is able to categorize objects in front of the vehicle with a very high level of reliability and detect an imminent collision. In addition to the two sensors, the whole function is integrated into the MFL4x0. If the relative speed to the detected object is less than 50 km/hour, a crash can be completely avoided. If the speed differences are greater, emergency braking will significantly reduce the force of the impact and crash severity. In addition, the camera based driver assistance functions such as lane departure warning, traffic sign recognition and intelligent headlamp control can be provided as usual. Moreover, pedestrian detection is possible. In summary, multifunction units provide a sensor package with a unique cost to benefit ratio.
Another method to achieve sensor fusion is to combine multiple sensor types in a single module to reduce cost and provide for simpler installation. Multifunction units can be configured with a wide variety of sensor combinations. Upper Left: • Aerostar TRL6 • Combines stereo camera with LiDAR Center: ADAS ONE HS-500F is an integrated camera system consisting of a front camera equipped with wide angle stereo camera, narrow angle monocular camera and an infrared IR camera. In performing ADAS, its stereo camera can detect an object within short distance while the monocular camera detects it in long distance away and its IR camera is for night vision function. The multifunction camera system provides more accurate vision data for multiple ADAS functions. Upper Right: Continental Multi Function Camera with LiDAR – MFL4x0. The latest innovation of the short range LiDAR technology will incorporate the multi-functional-camera MFC400. This provides multiple advantages in terms of packaging and function. The new MFL4x0 integrates an infrared short range LiDAR (Light Detection And Ranging) sensor and a CMOS camera into a single compact unit, which can be installed in the mirror base even in small cars. With the MFL4x0, Continental has for the first time integrated two highly competitive sensor technologies in one housing. The camera together with the short range. LiDAR are already in series production today bringing them together into one unit, however, it is a novelty. The new sensor module is able to categorize objects in front of the vehicle with a very high level of reliability and detect an imminent collision. In addition to the two sensors, the whole function is integrated into the MFL4x0. If the relative speed to the detected object is less than 50 km/hour, a crash can be completely avoided. If the speed differences are greater, emergency braking will significantly reduce the force of the impact and crash severity. In addition, the camera based driver assistance functions such as lane departure warning, traffic sign recognition and intelligent headlamp control can be provided as usual. Moreover, pedestrian detection is possible. In summary, multifunction units provide a sensor package with a unique cost to benefit ratio.